

目录
快速导航-

齿轮啮合机制与工程验证 | 基于动态传递误差的齿轮故障诊断动力学响应研究
齿轮啮合机制与工程验证 | 基于动态传递误差的齿轮故障诊断动力学响应研究
-
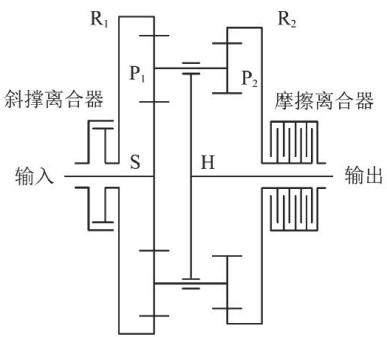
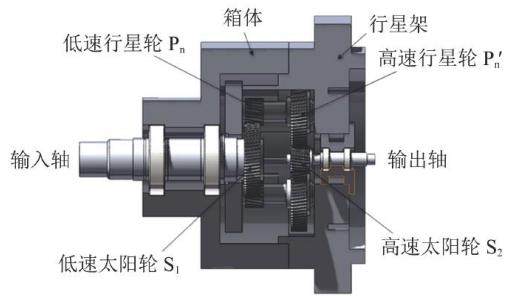
齿轮啮合机制与工程验证 | 复合行星轮系变转速传动系统动力学性能评估
齿轮啮合机制与工程验证 | 复合行星轮系变转速传动系统动力学性能评估
-

齿轮啮合机制与工程验证 | 复合材料与钢混合齿轮啮合刚度计算方法研究及影响分析
齿轮啮合机制与工程验证 | 复合材料与钢混合齿轮啮合刚度计算方法研究及影响分析
-

齿轮啮合机制与工程验证 | 轨道交通列车牵引斜齿轮副异侧齿面几何差异分析
齿轮啮合机制与工程验证 | 轨道交通列车牵引斜齿轮副异侧齿面几何差异分析
-

齿轮啮合机制与工程验证 | 考虑混合润滑摩擦效应的齿轮啮合应力场及其失效风险影响研究
齿轮啮合机制与工程验证 | 考虑混合润滑摩擦效应的齿轮啮合应力场及其失效风险影响研究
-
齿轮啮合机制与工程验证 | 高速双联行星增速齿轮箱振动特性分析
齿轮啮合机制与工程验证 | 高速双联行星增速齿轮箱振动特性分析
-

齿轮啮合机制与工程验证 | 基于时移多尺度注意斜率熵和SCA-SCN的风机齿轮箱故障诊断
齿轮啮合机制与工程验证 | 基于时移多尺度注意斜率熵和SCA-SCN的风机齿轮箱故障诊断
-

齿轮啮合机制与工程验证 | 基于周期诱导的多层循环辛矩阵分解的风电齿轮箱早期故障诊断
齿轮啮合机制与工程验证 | 基于周期诱导的多层循环辛矩阵分解的风电齿轮箱早期故障诊断
-

齿轮啮合机制与工程验证 | 富勒烯 C60 润滑油对行星齿轮轴的抗磨减摩试验分析
齿轮啮合机制与工程验证 | 富勒烯 C60 润滑油对行星齿轮轴的抗磨减摩试验分析
-
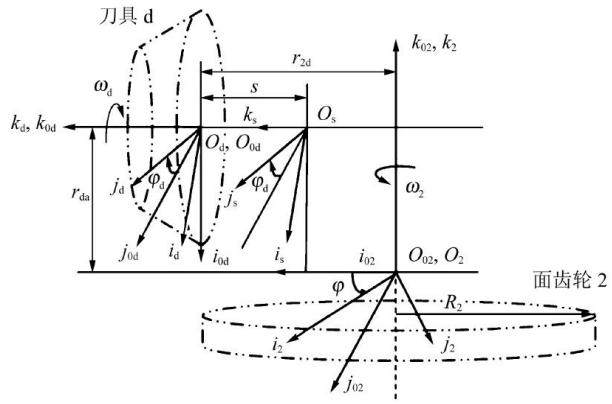
齿轮啮合机制与工程验证 | 曲线刀刃双自由度展成面齿轮及变位对齿宽的影响研究
齿轮啮合机制与工程验证 | 曲线刀刃双自由度展成面齿轮及变位对齿宽的影响研究
-

齿轮啮合机制与工程验证 | 安装误差对面齿轮副啮合区域面积的影响规律分析
齿轮啮合机制与工程验证 | 安装误差对面齿轮副啮合区域面积的影响规律分析
-
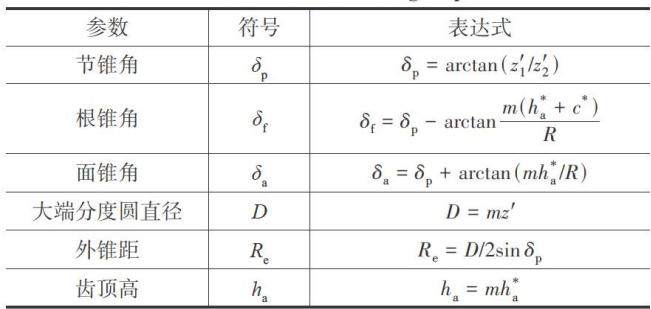
齿轮啮合机制与工程验证 | 球面渐开线锥齿轮齿面设计
齿轮啮合机制与工程验证 | 球面渐开线锥齿轮齿面设计
-

齿轮啮合机制与工程验证 | 考虑啮合冲击的电动汽车二级斜齿轮传动动力学特性分析
齿轮啮合机制与工程验证 | 考虑啮合冲击的电动汽车二级斜齿轮传动动力学特性分析
-

齿轮啮合机制与工程验证 | 风电四点支撑传动链弯矩传递受载分析及验证
齿轮啮合机制与工程验证 | 风电四点支撑传动链弯矩传递受载分析及验证
-
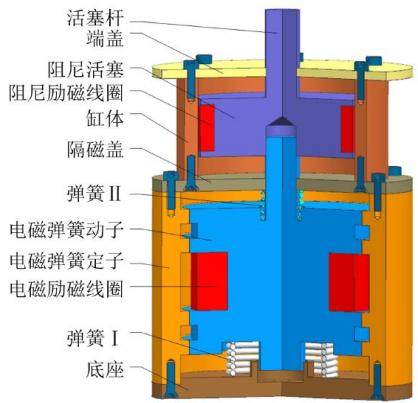
传动机构与机电融合 | 磁流变隔振器变刚度变阻尼性能研究
传动机构与机电融合 | 磁流变隔振器变刚度变阻尼性能研究
-

传动机构与机电融合 | 一种新型履带式管道检测机器人结构设计及管内通过性研究
传动机构与机电融合 | 一种新型履带式管道检测机器人结构设计及管内通过性研究
-
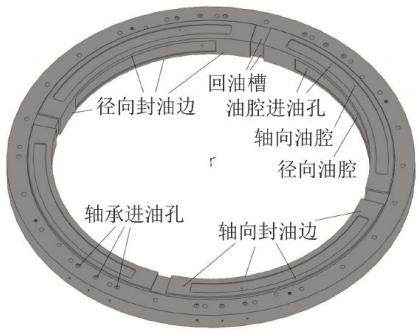
传动机构与机电融合 | 恒流静压推力轴承油腔结构多目标优化
传动机构与机电融合 | 恒流静压推力轴承油腔结构多目标优化
-

传动机构与机电融合 | 自行走式缠绕包装机器人动力学建模与控制模型仿真
传动机构与机电融合 | 自行走式缠绕包装机器人动力学建模与控制模型仿真
-

传动机构与机电融合 | 基于BAS-IPSO的工业机器人运动轨迹规划
传动机构与机电融合 | 基于BAS-IPSO的工业机器人运动轨迹规划
-

传动机构与机电融合 | 考虑铰链间隙和柔性构件的曲柄摇杆机构动力学优化研究
传动机构与机电融合 | 考虑铰链间隙和柔性构件的曲柄摇杆机构动力学优化研究
-

传动机构与机电融合 | 新能源汽车驱动电动机轴承润滑脂温升性能试验研究
传动机构与机电融合 | 新能源汽车驱动电动机轴承润滑脂温升性能试验研究
-

传动机构与机电融合 | 基于IAO优化VMD和DHKELM的滚动轴承故障诊断方法
传动机构与机电融合 | 基于IAO优化VMD和DHKELM的滚动轴承故障诊断方法












 登录
登录