

目录
快速导航-

力触觉感知与交互技术 | 触觉反馈辅助人-机器人异构编队对未知环境的协同搜索
力触觉感知与交互技术 | 触觉反馈辅助人-机器人异构编队对未知环境的协同搜索
-

力触觉感知与交互技术 | 用于上肢康复的 MR 制动器转矩控制方法
力触觉感知与交互技术 | 用于上肢康复的 MR 制动器转矩控制方法
-

力触觉感知与交互技术 | 人类视觉注意力引导的机器人半自主遥操作研究
力触觉感知与交互技术 | 人类视觉注意力引导的机器人半自主遥操作研究
-

力触觉感知与交互技术 | 基于 CDS-AFP 的纤维增强软体手力规划控制研究
力触觉感知与交互技术 | 基于 CDS-AFP 的纤维增强软体手力规划控制研究
-

力触觉感知与交互技术 | 服务机器人用刺绣型柔性传感器结构设计及优化
力触觉感知与交互技术 | 服务机器人用刺绣型柔性传感器结构设计及优化
-

力触觉感知与交互技术 | 融合多目标差分算法的机器人几何参数辨识
力触觉感知与交互技术 | 融合多目标差分算法的机器人几何参数辨识
-

力触觉感知与交互技术 | 基于数据手套的主从异构型机械臂交互控制方法
力触觉感知与交互技术 | 基于数据手套的主从异构型机械臂交互控制方法
-

测试方法 | 长杆弹侵彻混凝土的应力波响应特性数值模拟分析
测试方法 | 长杆弹侵彻混凝土的应力波响应特性数值模拟分析
-

测试方法 | 水体在线 γ 能谱测量检出限的影响因素分析
测试方法 | 水体在线 γ 能谱测量检出限的影响因素分析
-

测试方法 | 微波法微带八木天线原油含水率测量研究
测试方法 | 微波法微带八木天线原油含水率测量研究
-
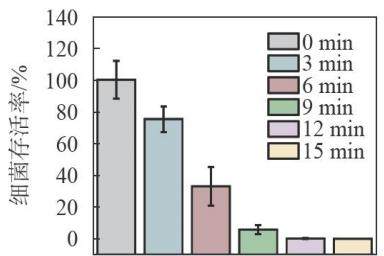
测试方法 | Cu/Ti3+ 共掺杂 TiO2 纳米材料光催化抗菌性能研究
测试方法 | Cu/Ti3+ 共掺杂 TiO2 纳米材料光催化抗菌性能研究
-

测试方法 | 电梯曳引钢带内部钢丝绳无损检测
测试方法 | 电梯曳引钢带内部钢丝绳无损检测
-

测试方法 | 场地电压驻波比的时域测量方法研究
测试方法 | 场地电压驻波比的时域测量方法研究
-

仪器设备 | 基于 ST-TCN-KAN 算法的光伏发电系统短期功率检测
仪器设备 | 基于 ST-TCN-KAN 算法的光伏发电系统短期功率检测
-

仪器设备 | SF6 氧化剂供给调节系统设计与优化研究
仪器设备 | SF6 氧化剂供给调节系统设计与优化研究
-

仪器设备 | 有限图像帧率下的纺纱锭子锭端振幅检测技术
仪器设备 | 有限图像帧率下的纺纱锭子锭端振幅检测技术
-

仪器设备 | 导线圆形电极覆冰的电容效应实验研究
仪器设备 | 导线圆形电极覆冰的电容效应实验研究
-

技术应用 | 动态环境下基于语义信息和多视图几何的视觉 SLAM 算法研究
技术应用 | 动态环境下基于语义信息和多视图几何的视觉 SLAM 算法研究
-

技术应用 | 基于 MSIWOA-LightGBM 的输汽管线蒸汽干度预测方法研究
技术应用 | 基于 MSIWOA-LightGBM 的输汽管线蒸汽干度预测方法研究
-

技术应用 | 考虑可再生能源接入的主动配电网双层规划 消纳优化方法
技术应用 | 考虑可再生能源接入的主动配电网双层规划 消纳优化方法
-

技术应用 | 混合神经网络融合寒潮特征的输电线路故障预测
技术应用 | 混合神经网络融合寒潮特征的输电线路故障预测
-

技术应用 | 基于 PMW 的两电平特定谐波消除策略
技术应用 | 基于 PMW 的两电平特定谐波消除策略













 登录
登录