
目录
快速导航-
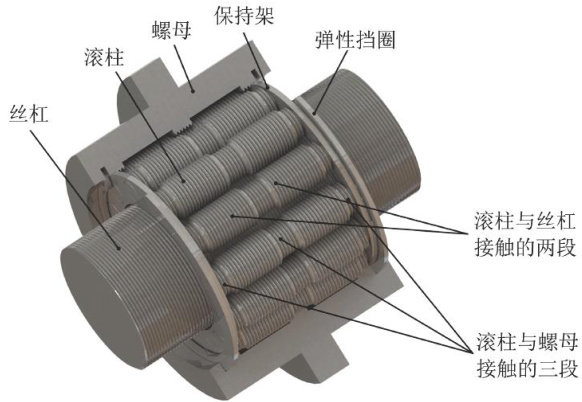
结构设计与参数优化 | 差动式行星滚柱丝杠副承载特性分析及修形设计
结构设计与参数优化 | 差动式行星滚柱丝杠副承载特性分析及修形设计
-
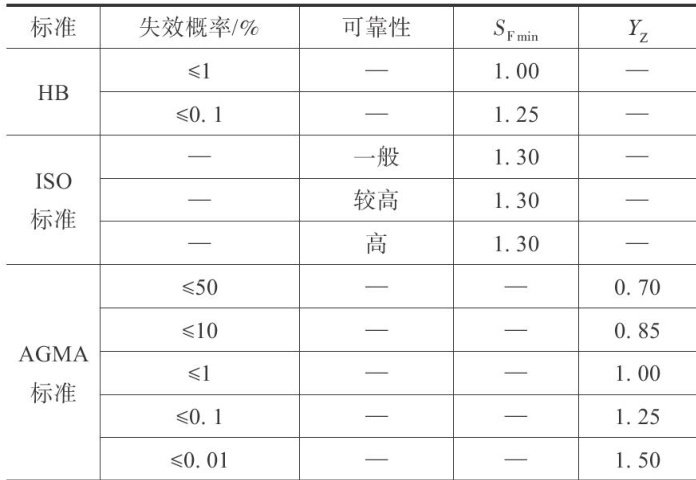
结构设计与参数优化 | 基于HB、ISO标准与AGMA标准的弧齿锥齿轮齿根弯曲强度计算对比分析
结构设计与参数优化 | 基于HB、ISO标准与AGMA标准的弧齿锥齿轮齿根弯曲强度计算对比分析
-
结构设计与参数优化 | 含中心距误差的行星轮系最大滑动率与变位系数优化的研究
结构设计与参数优化 | 含中心距误差的行星轮系最大滑动率与变位系数优化的研究
-
结构设计与参数优化 | 齿厚和齿距偏差对单齿啮合谐波齿轮回程误差的影响研究
结构设计与参数优化 | 齿厚和齿距偏差对单齿啮合谐波齿轮回程误差的影响研究
-
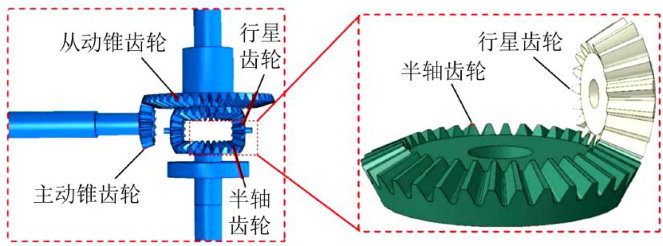
结构设计与参数优化 | 锥齿轮径向变位系数对差速器承载特性的影响
结构设计与参数优化 | 锥齿轮径向变位系数对差速器承载特性的影响
-

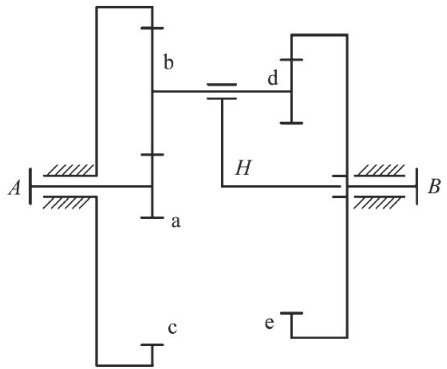
结构设计与参数优化 | 3K-H自锁行星轮系效率参数设计及仿真
结构设计与参数优化 | 3K-H自锁行星轮系效率参数设计及仿真
-

结构设计与参数优化 | 单侧齿廓磨损的渐开线直齿轮设计参数反求方法分析
结构设计与参数优化 | 单侧齿廓磨损的渐开线直齿轮设计参数反求方法分析
-
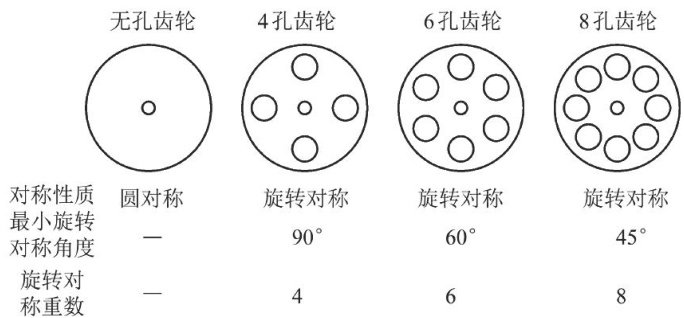
结构设计与参数优化 | 旋转对称重数对齿轮拓扑优化的影响
结构设计与参数优化 | 旋转对称重数对齿轮拓扑优化的影响
-
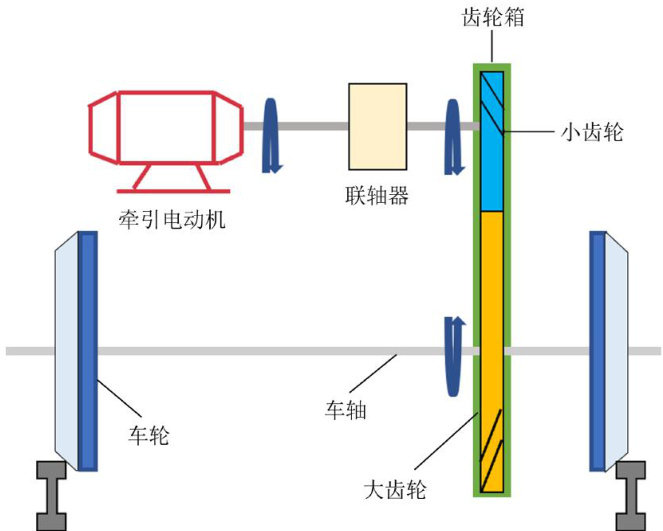
动态性能与啮合特性 | 基于组合代理模型的城轨车辆牵引齿轮传动系统振动优化研究
动态性能与啮合特性 | 基于组合代理模型的城轨车辆牵引齿轮传动系统振动优化研究
-

动态性能与啮合特性 | 计及箱体柔性的多级变速箱传动系统动态特性分析
动态性能与啮合特性 | 计及箱体柔性的多级变速箱传动系统动态特性分析
-

动态性能与啮合特性 | 考虑轴向分力的斜齿轮时变啮合刚度改进算法及影响因素研究
动态性能与啮合特性 | 考虑轴向分力的斜齿轮时变啮合刚度改进算法及影响因素研究
-

动态性能与啮合特性 | 不同工况下聚合物齿轮啮合表面温度场的研究
动态性能与啮合特性 | 不同工况下聚合物齿轮啮合表面温度场的研究
-
动态性能与啮合特性 | 基于曲线构型的小模数塑料齿轮温度场仿真与试验研究
动态性能与啮合特性 | 基于曲线构型的小模数塑料齿轮温度场仿真与试验研究
-
动态性能与啮合特性 | 等角螺旋线齿廓面齿轮啮合特性与应力分析
动态性能与啮合特性 | 等角螺旋线齿廓面齿轮啮合特性与应力分析
-

动态性能与啮合特性 | 无侧隙端面滚子包络蜗杆传动啮合性能分析
动态性能与啮合特性 | 无侧隙端面滚子包络蜗杆传动啮合性能分析
-

动态性能与啮合特性 | 考虑齿面微观形貌的磨损齿轮动态响应特性研究
动态性能与啮合特性 | 考虑齿面微观形貌的磨损齿轮动态响应特性研究
-
动态性能与啮合特性 | 小交错角变厚齿轮与渐开线圆柱齿轮传动啮合特性研究
动态性能与啮合特性 | 小交错角变厚齿轮与渐开线圆柱齿轮传动啮合特性研究
-
故障诊断与失效分析 | 基于FDBO 1+ Informer-ECANet的齿轮箱故障诊断分析
故障诊断与失效分析 | 基于FDBO 1+ Informer-ECANet的齿轮箱故障诊断分析
-

故障诊断与失效分析 | 基于优化VMD和ELM的行星齿轮箱故障诊断方法研究
故障诊断与失效分析 | 基于优化VMD和ELM的行星齿轮箱故障诊断方法研究
-
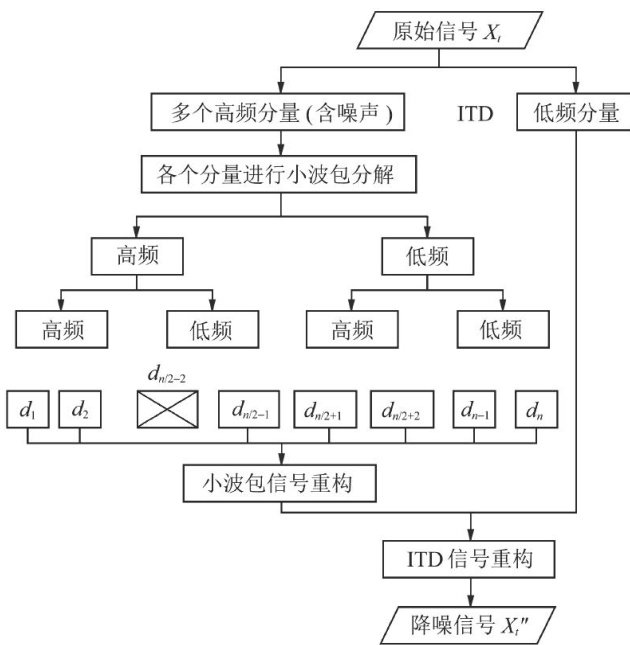
故障诊断与失效分析 | 基于ITD-WPT的齿轮裂纹冲击信号降噪方法
故障诊断与失效分析 | 基于ITD-WPT的齿轮裂纹冲击信号降噪方法
-

故障诊断与失效分析 | 塑料挤出机输入轴齿轮失效分析
故障诊断与失效分析 | 塑料挤出机输入轴齿轮失效分析
-

故障诊断与失效分析 | 考虑滚子修形的盾构机主轴承疲劳寿命计算
故障诊断与失效分析 | 考虑滚子修形的盾构机主轴承疲劳寿命计算












 登录
登录