
目录
快速导航-

| 非理想通信环境下车辆编队跟驰换道协同控制
| 非理想通信环境下车辆编队跟驰换道协同控制
-
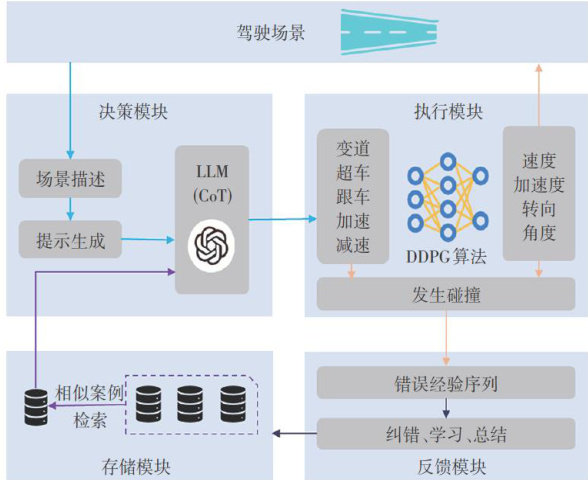
| 基于LLM-DDPG协同决控实现闭环自动驾驶
| 基于LLM-DDPG协同决控实现闭环自动驾驶
-
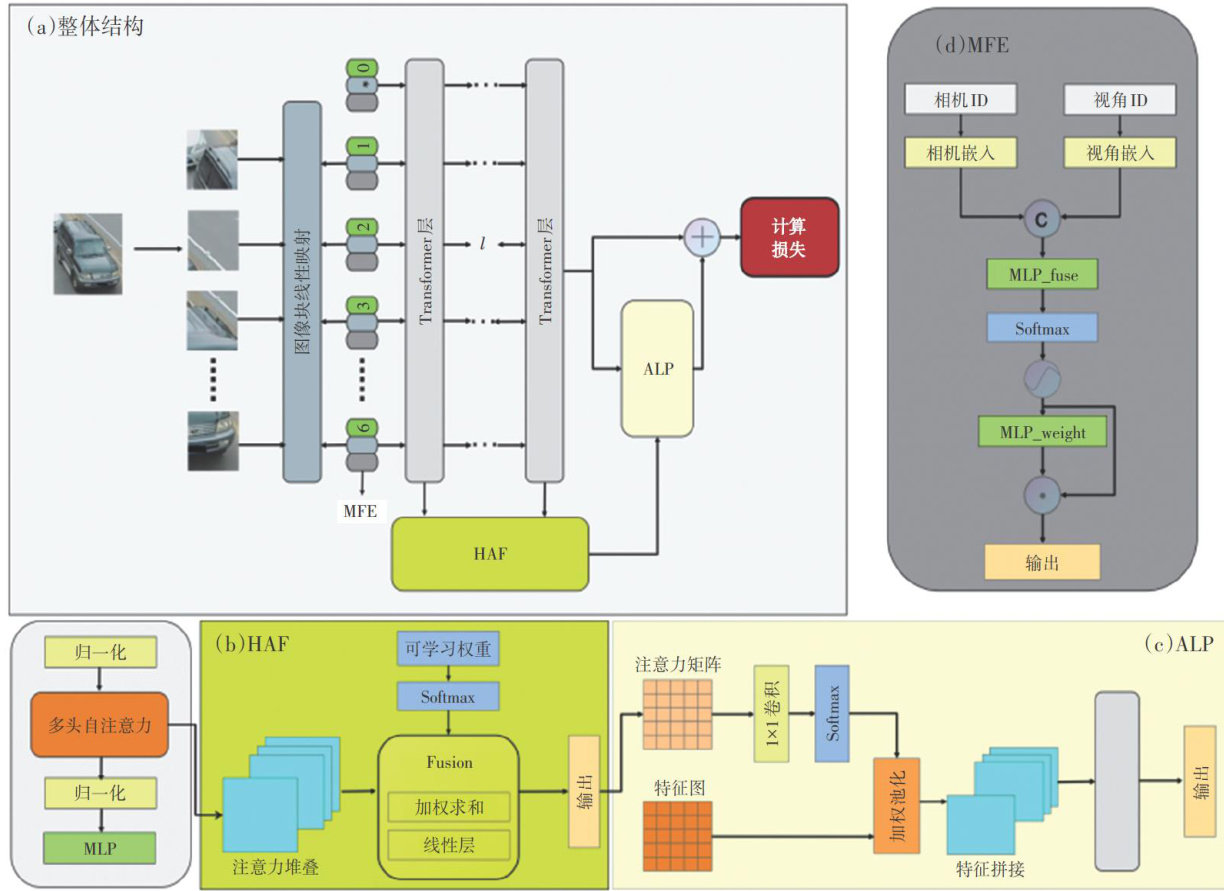
| 基于自适应局部划分VisionTransformer的车辆重识别方法
| 基于自适应局部划分VisionTransformer的车辆重识别方法
-
| 基于车辆和道路交通信息融合的电动重型载货汽车车速预测方法研究
| 基于车辆和道路交通信息融合的电动重型载货汽车车速预测方法研究
-

| 基于动态认知增强网络算法的激光回波信号优化研究
| 基于动态认知增强网络算法的激光回波信号优化研究
-
| 基于深度学习模型的高速永磁同步电机结构参数优化
| 基于深度学习模型的高速永磁同步电机结构参数优化
-
| 基于模糊STSM-LADRC的EMC测试装备控制策略研究
| 基于模糊STSM-LADRC的EMC测试装备控制策略研究











 登录
登录